






光真实感模拟在自动驾驶等应用中发挥着关键作用,其中神经网络辐射场(NeRFs)的进步可能通过自动创建数字3D资产来实现更好的可扩展性。然而,由于街道上相机运动的高度共线性和在高速下的稀疏采样,街景的重建质量受到影响。另一方面,该应用通常需要从偏离输入视角的相机视角进行渲染,以准确模拟如变道等行为。LidaRF提出了几个见解,允许更好地利用激光雷达数据来改善街景中NeRF的质量。首先,框架从激光雷达数据中学习几何场景表示,这些表示与基于隐式网格的解码器相结合,从而提供了由显示点云提供的更强的几何信息。其次,提出了一种鲁棒的遮挡感知深度监督训练策略,允许通过累积使用密集激光雷达点云的强势信息来改善街景中的NeRF重建质量。第三,根据激光雷达点的强度生成增强的训练视角,以进一步改进在真实驾驶场景下的新视角合成中获取的显著改进。 这样,通过框架从激光雷达数据中学习到的更加准确的几何场景表示,可以一步改进方法并在真实驾驶场景下获取更好的显著改进。
LidaRF的贡献主要体现在三个方面:
(i)混合激光雷达编码和网格特征以增强场景表示。虽然激光雷达已被用作自然的深度监控源,但将激光雷达纳入NeRF输入中,为几何归纳提供了巨大的潜力,但实现起来并不简单。为此,借用了基于网格的表示法,但将从点云中学习的特征融合到网格中,以继承显式点云表示法的优势。通过3D感知框架成功的启动,利用3D稀疏疗卷积网络作为一种有效且高效的结构,从激光雷达点云的局部和全局上下文中提取几何特征。
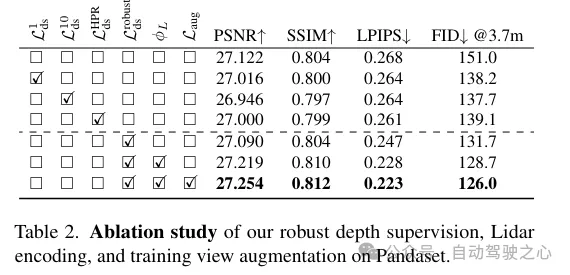
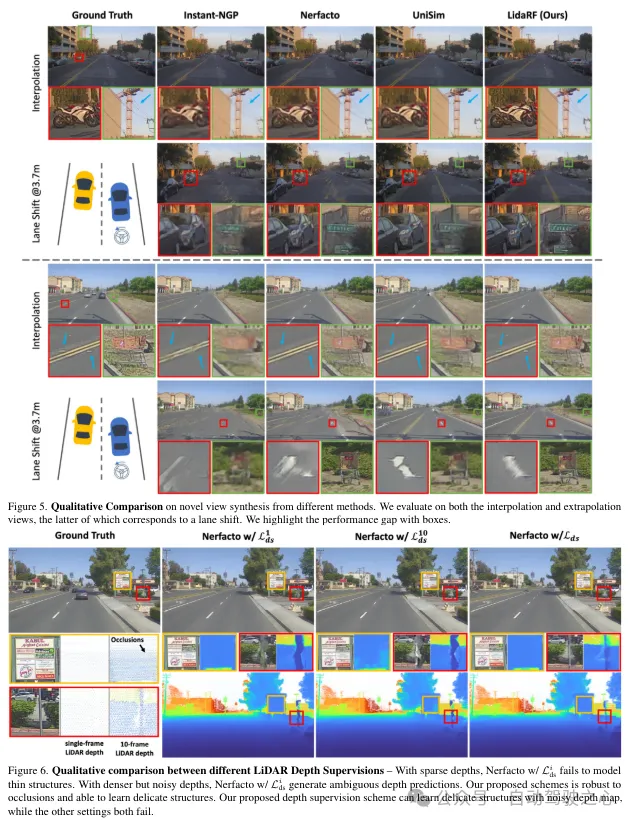
(ii)鲁棒的遮挡感知深度监督。与现有工作类似,这里也使用激光雷达作为深度监督的来源,但更加深入。由于激光雷达点的稀疏性限制了其有效性,尤其是在低纹理区域,通过跨邻近帧集化激光雷达点来生成更密集的深度图。然而,这样获得的深度图没有考虑到遮挡,产生了错误的深度监督。因此,提出了一种健壮的深度监督方案,借用class学习的方式——从近场到远场逐步监督深度,并在NeRF训练过程中逐渐滤除错误的深度,从而更有效地从激光雷达中学习深度。
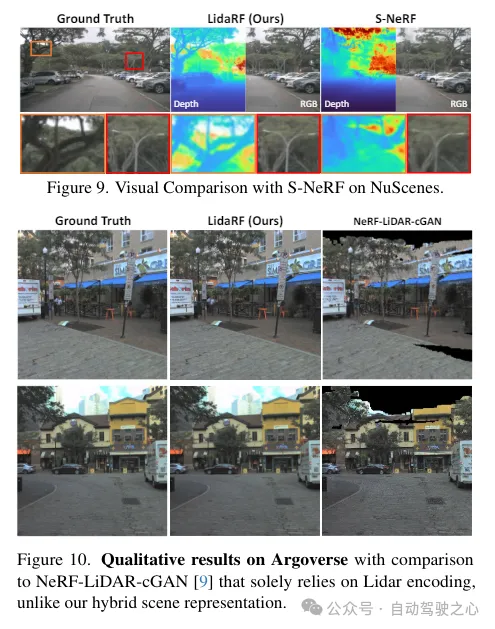
(iii)基于激光雷达的视图增强。此外,鉴于驾驶场景中的视图稀疏性和覆盖有限,利用激光雷达来密集化训练视图。也就是说,将累积的激光雷达点投影到新的训练视图中;请注意,这些视图可能与驾驶轨迹有一定的偏离。这些从激光雷达投影的视图被添加到训练数据集中,它们并没有考虑到遮挡问题。然而,我们应用了前面提到的监督方案来解决遮挡问题,从而提高了性能。虽然我们的方法也适用于一般场景,但在这项工作中更专注于街道场景的评估,并与现有技术相比,无论是定量还是定性,都取得了显著的改进。
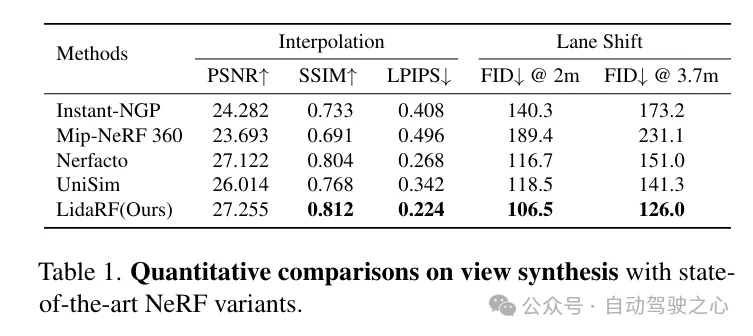
LidaRF在需要更大程度偏离输入视图的有趣应用中也显示出优势,在具有挑战性的街道场景应用中显著提高了NeRF的质量。
LidaRF整体框架一览
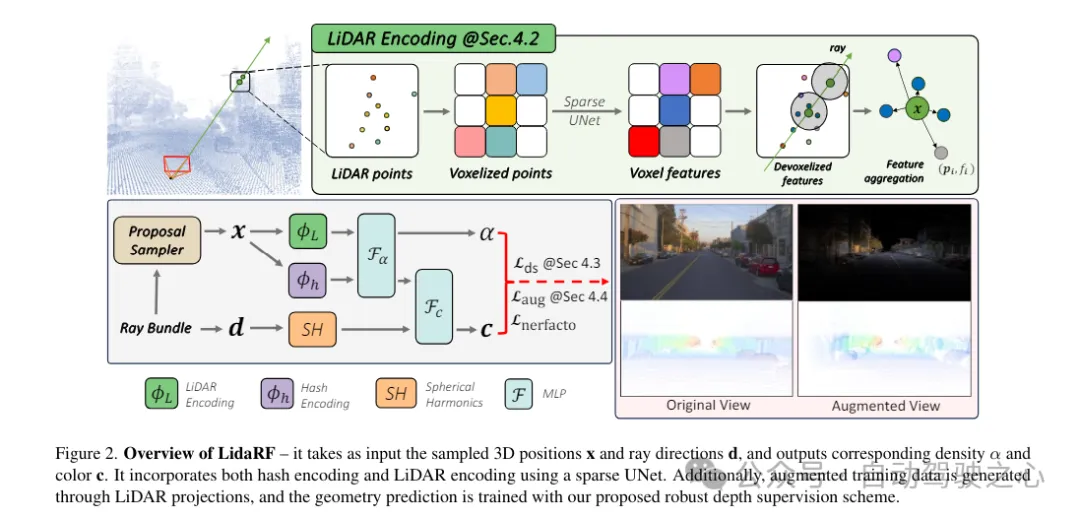
LidaRF是一种用于输入和输出对应的密度和颜色的方法,它采用了UNet融合了哈夫编码和激光雷达编码。此外,通过激光雷达投影生成强化训练数据,使用提出的健壮深度监督方案训练几何预测。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
免费无限量使用 DeepSeek R1 模型☜☜☜
1)激光雷达编码的混合表示法
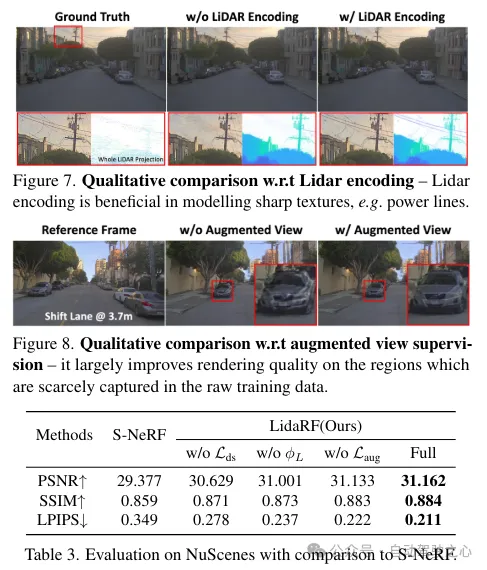
激光雷达点云具有强大的几何指导潜力,这对NeRF(神经渲染场)来说极具价值。然而,仅依赖激光雷达特征来进行场景表示,由于激光雷达点的稀疏性(尽管有时间累积),会导致低分辨率的渲染。此外,由于激光雷达的视野有限,例如它不能捕获超过一定高度的建筑物表面,因此在这些区域中会出现空白渲染。相比之下,本文的框架融合了激光雷达特征和高分辨率的空间网格特征,以利用两者的优势,并共同学习以实现高质量和完整的场景渲染。
激光雷达特征提取。在这里详细描述了每个激光雷达点的几何特征提取过程,参照图2,首先将整个序列的所有帧的激光雷达点云聚合起来,以构建更密集的点云集合。然后将点云体素化为体素网格,其中每个体素单元内的点的空间位置进行平均,为每个体素单元生成一个3维特征。受到3D感知框架广泛成功的启发,在体素网格上使用3D稀疏UNet对场景几何特征进行编码,这允许从场景几何的全局上下文中学习。3D稀疏UNet将体素网格及其3维特征作为输入,并输出neural volumetric 特征,每个被占用的体素由n维特征组成。
 Canva AI
Canva AI
Canva平台AI图片生成工具
 1374
查看详情
1374
查看详情

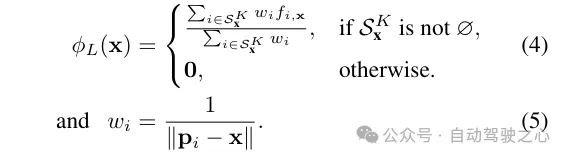
激光雷达特征查询。对于沿着要渲染的射线上的每个样本点x,如果在搜索半径R内有至少K个附近的激光雷达点,则查询其激光雷达特征;否则,其激光雷达特征被设置为空(即全零)。具体来说,采用固定半径最近邻(FRNN)方法来搜索与x相关的K个最近的激光雷达点索引集,记作。与[9]中在启动训练过程之前预先确定射线采样点的方法不同,本文的方法在执行FRNN搜索时是实时的,因为随着NeRF训练的收敛,来自region网络的样本点分布会动态地趋向于集中在表面上。遵循Point-NeRF的方法,我们的方法利用一个多层感知机(MLP)F,将每个点的激光雷达特征映射到神经场景描述中。对于x的第i个邻近点,F将激光雷达特征和相对位置作为输入,并输出神经场景描述作为:

为了获得采样位置x处的最终激光雷达编码ϕ,使用标准的反距离权重法来聚合其K个邻近点的神经场景描述
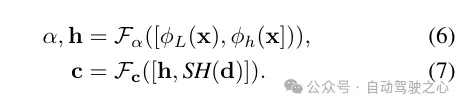
辐射解码的特征融合。将激光雷达编码ϕL与哈希编码ϕh进行拼接,并应用一个多层感知机Fα来预测每个样本的密度α和密度嵌入h。最后,通过另一个多层感知机Fc,根据观察方向d的球面谐波编码SH和密度嵌入h来预测相应的颜色c。
2)鲁棒深度监督
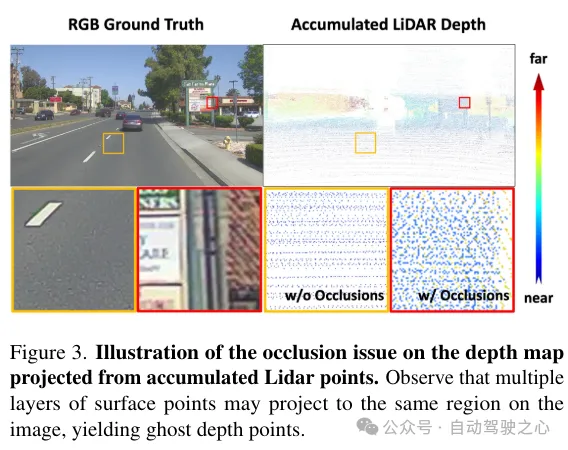
除了特征编码外,还通过将激光雷达点投影到图像平面上来从它们中获取深度监督。然而,由于激光雷达点的稀疏性,所得益处有限,不足以重建低纹理区域,如路面。在这里,我们提出累积相邻的激光雷达帧以增加密度。尽管3D点能够准确地捕获场景结构,但在将它们投影到图像平面以进行深度监督时,需要考虑点之间的遮挡。遮挡是由于相机与激光雷达及其相邻帧之间的位移增加而产生的,从而产生虚假的深度监督,如图3所示。由于即使累积后激光雷达的稀疏性,处理这个问题也非常困难,使得诸如z缓冲之类的基本原理图形技术无法应用。在这项工作中,提出了一种鲁棒的监督方案,以在训练NeRF时自动过滤掉虚假的深度监督。
遮挡感知的鲁棒监督方案。本文设计了一个class训练策略,使得模型最初使用更近、更可靠的深度数据进行训练,这些数据更不容易受到遮挡的影响。随着训练的进行,模型逐渐开始融合更远的深度数据。同时,模型还具备了丢弃与其预测相比异常遥远的深度监督的能力。
回想一下,由于车载摄像头的向前运动,它产生的训练图像是稀疏的,视野覆盖有限,这给NeRF重建带来了挑战,尤其是当新视图偏离车辆轨迹时。在这里,我们提出利用激光雷达来增强训练数据。首先,我们通过将每个激光雷达帧的点云投影到其同步的摄像头上并为RGB值进行插值来为其上色。累积上色的点云,并将其投影到一组合成增强的视图上,生成如图2所示的合成图像和深度图。
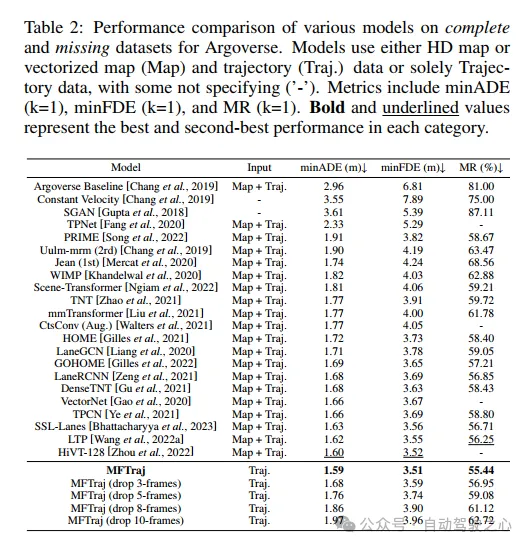
实验对比分析
以上就是LidaRF:研究用于街景神经辐射场的激光雷达数据(CVPR'24)的详细内容,更多请关注其它相关文章!
# 如图
# seo影响因素有哪些
# 吉林抖音seo推荐公司
# 永安外贸网站建设
# 六安优化seo
# 青岛行业关键词排名
# 闵行网站建设的关键事项
# 猎州实体短视频营销推广
# SEO实验室拍照手机
# 完美日记seo问题分析
# 网站建设创意新颖
# 数据
# 梦中
# 考虑到
# 并在
# 但在
# 太平洋
# 维特
# 中东
# 在这里
# 提出了
# 雷达
相关栏目:
【
企业资讯168 】
【
行业动态20933 】
【
网络营销52431 】
【
网络学院91036 】
【
运营推广7012 】
【
科技资讯60970 】
相关推荐:
美图公司影像节或发布AI设计新品
吴恩达、Hinton最新对话!AI不是随机鹦鹉,共识胜过一切,LeCun双手赞成
RoboNeo操作教程
“踩油门,也要会踩刹车” 互联网企业高管谈人工智能发展
AI技术加速迭代:周鸿祎视角下的大模型战略
赋能选题探索:AI助手在经济学专业中的应用指南
应用生成式人工智能技术改善农业产业
技术如何使人变得懒惰?
先进技术在防止全球数据丢失方面的作用
一家 380 亿美元的数据巨头,要掀起企业「AI 化」革命
「社交达人」GPT-4!解读表情、揣测心理全都会
视觉中国推出AI灵感绘图功能,付费后可在“合法合规前提下使用”
7/8上海 | 2025世界人工智能大会分论坛:科技与人文-共筑无障碍智能社会
华为HarmonyOS 4:享流畅提升20%,AI大模型更智能一览无余
iPhone两秒出图,目前已知的最快移动端Stable Diffusion模型来了
再也不怕「视频会议」尬住了!谷歌CHI顶会发布新神器Visual Captions:让图片做你的字幕助手
国家发改委组织工业机器人产业高质量发展现场会
一公司推出喷火机器狗,可喷出 9 米长火焰
用人工智能技术,亚马逊为用户生成产品评论摘要,帮助他们轻松选购
鸿蒙4即将支持大规模AI模型
马斯克回应人工智能拯救世界:人类已处于“半机器人”状态
中国气象局预测:到 2030 年,中国人工智能气象应用将达到国际领先水平
英伟达CEO宣称生成式AI已迎来“划时代时刻”
第四范式「式说」大模型入选《2025年通用人工智能创新应用案例集》
月薪6万,哪些AI岗位在抢人?
生成式人工智能进入产业应用!但再“聪明”仍是工具,最终目的是服务于人
美图公司:Wink国内首发AI画面拓展功能
OpenOOD更新v1.5:全面、精确的分布外检测代码库及测试平台,支持在线排行榜、一键测试
实践J*a开发,构建高性能的MongoDB数据迁移工具
套娃不可取:研究人员证实用AI生成的结果训练AI将导致模型退化
谷歌计划在上海举办开发者大会,重点关注机器学习和生成式AI领域
OpenAI大神Karpathy最新分享:为什么OpenAI内部对AI Agents最感兴趣
江永:精准施训提升通信无人机应急救援能力
吉林首例!机器人辅助下搭桥手术成功实施
生成式人工智能来了,如何保护未成年人? | 社会科学报
联合国秘书长称支持建立全球人工智能监管机构
DeepMind用AI重写排序算法;将33B大模型塞进单个消费级GPU
Meta发布"类人"AI图像创建模型,能解决多出手指等Bug
这效果能打几分?AI真人化《名侦探柯南》
以计算机视觉技术为基础的库存管理如何改革零售行业
华为昇腾AI原生支持30多种基础大模型,包括GPT
城市在采用人工智能方面进展如何?
优傲机器人的人机协作技术 助力中小企发展
英伟达的AI领域垄断地位:一直无法撼动吗?
零数科技CTO兰春嘉:区块链与人工智能的结合点在数据
无人机协助盐城交通执法的协同训练
小米的雷军宣布小爱同学成为首款全面采用AI大模型的产品
学而思网校推出首个基于自研大模型的《人工智能第一课》
2025 年开发者必须知道的六个 AI 工具
马斯克讽刺人工智能炒作:什么“机器学习”,其实就是统计
